Leckerkennung in Wasserversorgungsnetzen
Beitrag von Gastbeitrag von Dr.-Ing. Hildegard Lyko Chefredakteurin gwf Wasser|Abwasser und F&S Filtrieren und Separieren Vulkan Verlag
Wasser, das aus schadhaften Leitungen in den Untergrund läuft, ist nicht nur verschwendetes Wasser, sondern auch verschwendete Energie für die Trinkwasserproduktion und -verteilung. Um diese Verluste zu minimieren, ist eine frühzeitige Leckortung und Reparatur vonnöten.
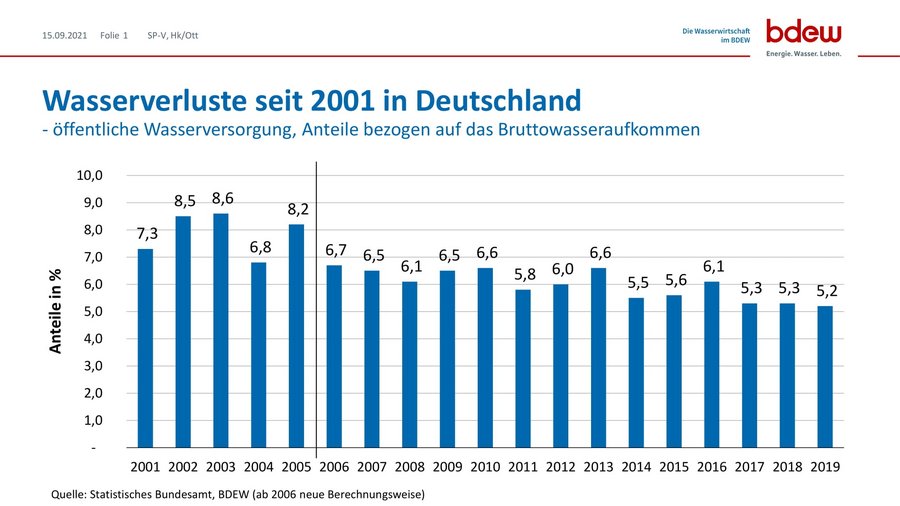
In Deutschland beträgt die mittlere Wasserverlustrate gut 5 % bezogen auf das Bruttowasseraufkommen (s. Abb.). Bei einer gesamten Rohwasserentnahme von 5,2 Mrd. m3 /a (Daten des Umweltbundesamtes für 2016, s. www.umweltbundesamt.de) bedeutet das einen Wasserverlust von 260 Mio. m3 /a. Legt man einen spezifischen Energieverbrauch für die Trinkwasserproduktion von 0,5 kWh/m3 zugrunde, werden außerdem 130 Mio. kWh/a an Energie verschwendet, verbunden mit sinnlosen CO2 -Emissionen. Die Ortung und Behebung von Leckagen in Trinkwasserleitungen gehört damit zu den Daueraufgaben von Wasserversorgern. Um Trinkwasserverluste zu minimieren, existieren verschiedene Möglichkeiten, Lecks möglichst frühzeitig zu erkennen und nicht erst, wenn ein Wasserrohrbruch durch oberirdisches Ausströmen weithin sichtbar wird. Strategien zur Ermittlung von Leitungsverlusten beschreibt das DVGW-Arbeitsblatt 392 [1]. Während das bewährte Verfahren der Geräuschpegelmessung durch die Möglichkeit, internetfähige Sensoren einzusetzen, in den Fokus der IT-Spezialisten gerückt ist, gibt es neuerdings auch alternative Verfahren für eine kontinuierliche und automatisierte Leitungsüberwachung.
Akustische Leitungsüberwachung
Fließendes Wasser erzeugt Geräusche und Veränderungen im Strömungszustand des Wassers äußern sich in einer Änderung des Fließgeräusches. Mit empfindlichen Schallmessgeräten, die idealerweise an zugänglichen Stellen des Wassernetzes, wie Schieber oder Hydranten, dauerhaft installiert sind oder bei Inspektionsgängen manuell eingesetzt werden sind, lassen sich diese Veränderungen detektieren. Wurde eine Veränderung, die auf eine undichte Stelle hinweist, gemessen, muss der Schadensort vor der Sanierung lokalisiert werden. Um festzustellen, an welcher Stelle genau sich eine Leckstelle befindet, werden die Geräuschmesswerte an zwei benachbarten Messpunkten, zwischen denen sich das Leck befindet, korreliert: das Signal von der Messstelle mit der größeren Entfernung zum Schadensort kommt später am Geräuschsensor an als das vom nähergelegenen Messpunkt. Aus dem Zeitverzug lässt sich bei Kenntnis der Schallgeschwindigkeit im Rohr und der Leitungslänge zwischen beiden Messpunkten der Abstand zwischen Messpunkt und Leck berechnen. Dabei sind das Rohrleitungsmaterial und die Länge der Korrelationsstrecke von entscheidender Bedeutung, denn die erfolgreiche Ortung setzt die Kenntnis der Schallgeschwindigkeit in der Leitung voraus.
Die Erfassung von Schalländerungen an bestimmten Punkten in Wassernetzen lässt sich mit Hilfe von Datenloggern gut automatisieren, indem diese ihre Daten über ein Mobilfunknetz senden, so dass sie über eine Cloud abgerufen werden können. Dieses ist sowohl für fest installierte Datenlogger als auch für solche, die über bestimmte Zeiträume an bestimmten Orten angebracht werden, möglich. Angesichts der Länge von Leitungsnetzen und der damit verbundenen hohen Zahl an denkbaren Messpunkten stellt sich allerdings die Frage: Wie viele Datenlogger werden gebraucht und wenn sie nicht dauerhaft senden, wo, in welchen Zeitabständen und für wie lange sollen sie eingesetzt werden? Das ist sicher nicht nur eine Frage der Kosten für diese Geräte, sondern auch des personellen Aufwandes bei der mobilen Installation und der Menge an Daten, die empfangen und ausgewertet werden müssen, um sicher zu sein, dass der Zustand des gesamten Netzes gut genug überwacht werden kann. Denn der Anspruch, Wasserverluste zu minimieren und spektakuläre Schäden durch vorausschauende Instandhaltung zu vermeiden, sollte auch so effizient wie möglich erfüllt werden.
Um den Einsatz von Geräuschpegelloggern in diesem Sinne zu optimieren, entwickelten Wissenschaftler:innen des IWW Zentrums Wasser in Mülheim im Rahmen eines von E.ON SE geförderten Forschungsprojektes ein Excel-Tool, das Anwender bei der Entscheidungsfindung zur optimalen Nutzung von Geräuschpegelloggern unterstützt. In Zusammenarbeit mit drei Wasserversorgern entstand ein System, mit dessen Hilfe Anwender ihre Rohrnetze bewerten, neuralgische Leitungsabschnitte identifizieren und nach Instandhaltungsprioritäten einteilen können. Abhängig von den Umgebungsbedingungen der Netze (Bodenverhältnisse) lassen sich kosteneffektive Szenarien zum Einsatz von Geräuschpegelloggern ableiten. Die Details dieses Projekts und des Excel-Tools sind in [2] veröffentlicht.
Trinkwasserleitungen von innen inspizieren
Kamerabasierte Inspektionstechniken sind im Rahmen der Überprüfung von Abwasserleitungen seit langem etabliert. Allerdings werden die meisten Abwasserkanäle und -leitungen drucklos betrieben und das Einbringen eines Messgerätes oder dgl. lässt dort kaum eine Verschlechterung der hygienischen Verhältnisse erwarten. Das ist bei Trinkwasserleitungen natürlich anders. Kamerainspektionen kommen dort nur in Leitungsabschnitten infrage, die zuvor gegen das übrige Netz abgeriegelt und entleert wurden. Das könnte sich bald ändern, denn die ersten Systeme zur Inspektion des Leitungsinneren, die für den Einsatz während des laufenden Betriebs entwickelt wurden, befinden sich in der Erprobung.
Im Projekt OptInspect erforscht das TZW: DVGW-Forschungszentrum Wasser die Wasserschlange des deutschen Herstellers Gullyver (s. auch [3]). Die Wasserschlange ist ein optisch-akustisches Inspektionssystem, mit dem Leitungslängen von bis zu 2,5 km untersucht werden können, ohne das Rohr vorher entleeren zu müssen. Um Randbedingungen zu definieren, unter denen die Wasserschlange im Trinkwasserbereich eingesetzt werden kann, wird die Schlange zunächst in einem 50 m langen Modellnetz mit durchsichtigen Leitungen getestet. Danach kommt es in einer zweiten Projektphase zum praktischen Einsatz bei den 15 am Projekt beteiligten Wasserversorgern.
In den Niederlanden entstand in einer Partnerschaft von sieben Trinkwasserversorgern zusammen mit dem KWR Water Research Institute und dem Mechatronikunternehmen Demcon der autonome Inspektionsroboter SubMerge. Dieses System wird mittlerweile unter der Flagge des eigens dafür gegründeten Unternehmens SubMerge b.v. weiterentwickelt (www.submerge.tech).
Ein solcher Roboter soll sich in einem Trinkwassersystem frei bewegen und selbstständig navigieren. Rohrbögen, Durchmesseränderungen, Übergänge zwischen verschiedenen Rohrwerkstoffen, T-Stücke oder andere Abzweigungen dürfen kein Hindernis darstellen. Um SubMerge zu testen, baute KWR ein aufwändiges Testnetz mit vielen verschiedenen, in Trinkwasserleitungen üblichen Materialien und diversen potenziellen „Hindernissen“. Dieses Netz ist in [4] detailliert beschrieben. SubMerge soll 2023 bei den Wasserversorgern Vitens, Brabant Water and Evides zum ersten Mal im Feld getestet werden. Das Modellnetz bei KWR steht für weitere Projekte zur Verfügung.
Satellitengestützte Inspektion
Nicht von innen, sondern von oben schauen Satelliten mit bodendurchdringendem Radar (ground penetrating radar GPR) mit synthetischer Apertur auf die Erde. Das Verfahren des israelischen Unternehmens ASTERRA (www.asterra.io) nutzt diese Satellitenbilder, um mit Hilfe eines speziellen Algorithmus‘ Feuchtigkeitsinseln im Boden aufzuspüren. Die gefundenen feuchten Stellen werden mit dem GIS-basierten Lageplan abgeglichen: Nach Angaben des Unternehmens ist dieses Verfahren, das mittlerweile von der American Water Works Association als innovatives Verfahren anerkannt wurde, das preiswerteste Leckdetektionsverfahren – umgerechnet auf die gefundenen Lecks.
Literatur
[1] DVGW W 392: Wasserverlust in Rohrnetzen; Ermittlung, Wasserbilanz, Kennzahlen, Überwachung. Technische Regel – Arbeitsblatt Sept. 2017
[2] M. Offermann, M. Juschak, A. Becker: Entscheidungsunterstützungssystem zur Optimierung von Geräuschpegelloggerbasierten Instandhaltungsstrategien. gwf Wasser|Abwasser 01/2022, S. 40 – 46.
[3] L. Anders: TV-Inspektion von bis zu 2500 m langen Druckleitungen DN 80 bis 300. 3R 09/2019, S. 52 – 54.
[4] P. van Thienen, L. de Waal, J. van Summeren, N. Slaats, S. Meijering, B. Hillebrand: Repräsentatives Trinkwassernetz zur Prüfung von Inspektionsrobotern und für die Forschung im Bereich der Wasserverteilung. gwf Wasser|Abwasser 01/2022, S. 65 – 80.
Erstmals erschienen in: TiB Ausgabe 2022 MÄR/APR